Class implementing Fourier transform profilometry (FTP) , phase-shifting profilometry (PSP) and Fourier-assisted phase-shifting profilometry (FAPS) based on [faps]. More...
Public Member Functions | |
| void | computePhaseMap (List< Mat > patternImages, Mat wrappedPhaseMap, Mat shadowMask, Mat fundamental) |
| Compute a wrapped phase map from sinusoidal patterns. More... | |
| void | computePhaseMap (List< Mat > patternImages, Mat wrappedPhaseMap, Mat shadowMask) |
| Compute a wrapped phase map from sinusoidal patterns. More... | |
| void | computePhaseMap (List< Mat > patternImages, Mat wrappedPhaseMap) |
| Compute a wrapped phase map from sinusoidal patterns. More... | |
| void | unwrapPhaseMap (Mat wrappedPhaseMap, Mat unwrappedPhaseMap, Size camSize, Mat shadowMask) |
| Unwrap the wrapped phase map to remove phase ambiguities. More... | |
| void | unwrapPhaseMap (Mat wrappedPhaseMap, Mat unwrappedPhaseMap, Size camSize) |
| Unwrap the wrapped phase map to remove phase ambiguities. More... | |
| void | findProCamMatches (Mat projUnwrappedPhaseMap, Mat camUnwrappedPhaseMap, List< Mat > matches) |
| Find correspondences between the two devices thanks to unwrapped phase maps. More... | |
| void | computeDataModulationTerm (List< Mat > patternImages, Mat dataModulationTerm, Mat shadowMask) |
| compute the data modulation term. More... | |
 Public Member Functions inherited from OpenCVForUnity.Structured_lightModule.StructuredLightPattern Public Member Functions inherited from OpenCVForUnity.Structured_lightModule.StructuredLightPattern | |
| bool | generate (List< Mat > patternImages) |
| Generates the structured light pattern to project. More... | |
| Public Member Functions inherited from OpenCVForUnity.CoreModule.Algorithm | |
| IntPtr | getNativeObjAddr () |
| virtual void | clear () |
| Clears the algorithm state. More... | |
| virtual bool | empty () |
| Returns true if the Algorithm is empty (e.g. in the very beginning or after unsuccessful read. More... | |
| void | save (string filename) |
| virtual string | getDefaultName () |
| Public Member Functions inherited from OpenCVForUnity.DisposableObject | |
| void | Dispose () |
| void | ThrowIfDisposed () |
Static Public Member Functions | |
| static new SinusoidalPattern | __fromPtr__ (IntPtr addr) |
| static SinusoidalPattern | create (SinusoidalPattern_Params parameters) |
| Constructor. More... | |
| static SinusoidalPattern | create () |
| Constructor. More... | |
| Static Public Member Functions inherited from OpenCVForUnity.Structured_lightModule.StructuredLightPattern | |
| static new StructuredLightPattern | __fromPtr__ (IntPtr addr) |
| Static Public Member Functions inherited from OpenCVForUnity.CoreModule.Algorithm | |
| static Algorithm | __fromPtr__ (IntPtr addr) |
| Static Public Member Functions inherited from OpenCVForUnity.DisposableObject | |
| static IntPtr | ThrowIfNullIntPtr (IntPtr ptr) |
Protected Member Functions | |
| override void | Dispose (bool disposing) |
| Protected Member Functions inherited from OpenCVForUnity.Structured_lightModule.StructuredLightPattern | |
| override void | Dispose (bool disposing) |
| Protected Member Functions inherited from OpenCVForUnity.DisposableOpenCVObject | |
| DisposableOpenCVObject () | |
| DisposableOpenCVObject (IntPtr ptr) | |
| DisposableOpenCVObject (bool isEnabledDispose) | |
| DisposableOpenCVObject (IntPtr ptr, bool isEnabledDispose) | |
| Protected Member Functions inherited from OpenCVForUnity.DisposableObject | |
| DisposableObject () | |
| DisposableObject (bool isEnabledDispose) | |
Additional Inherited Members | |
| Properties inherited from OpenCVForUnity.DisposableObject | |
| bool | IsDisposed [get, protected set] |
| bool | IsEnabledDispose [get, set] |
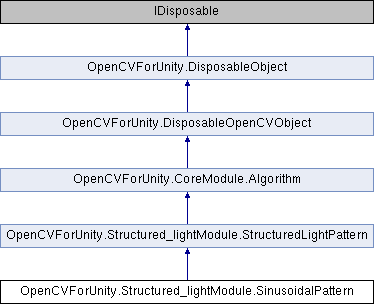
Detailed Description
Class implementing Fourier transform profilometry (FTP) , phase-shifting profilometry (PSP) and Fourier-assisted phase-shifting profilometry (FAPS) based on [faps].
This class generates sinusoidal patterns that can be used with FTP, PSP and FAPS.
Member Function Documentation
◆ __fromPtr__()
|
static |
◆ computeDataModulationTerm()
| void OpenCVForUnity.Structured_lightModule.SinusoidalPattern.computeDataModulationTerm | ( | List< Mat > | patternImages, |
| Mat | dataModulationTerm, | ||
| Mat | shadowMask | ||
| ) |
compute the data modulation term.
- Parameters
-
patternImages captured images with projected patterns. dataModulationTerm Mat where the data modulation term is saved. shadowMask Mask used to discard shadow regions.
◆ computePhaseMap() [1/3]
| void OpenCVForUnity.Structured_lightModule.SinusoidalPattern.computePhaseMap | ( | List< Mat > | patternImages, |
| Mat | wrappedPhaseMap, | ||
| Mat | shadowMask, | ||
| Mat | fundamental | ||
| ) |
Compute a wrapped phase map from sinusoidal patterns.
- Parameters
-
patternImages Input data to compute the wrapped phase map. wrappedPhaseMap Wrapped phase map obtained through one of the three methods. shadowMask Mask used to discard shadow regions. fundamental Fundamental matrix used to compute epipolar lines and ease the matching step.
◆ computePhaseMap() [2/3]
| void OpenCVForUnity.Structured_lightModule.SinusoidalPattern.computePhaseMap | ( | List< Mat > | patternImages, |
| Mat | wrappedPhaseMap, | ||
| Mat | shadowMask | ||
| ) |
Compute a wrapped phase map from sinusoidal patterns.
- Parameters
-
patternImages Input data to compute the wrapped phase map. wrappedPhaseMap Wrapped phase map obtained through one of the three methods. shadowMask Mask used to discard shadow regions. fundamental Fundamental matrix used to compute epipolar lines and ease the matching step.
◆ computePhaseMap() [3/3]
| void OpenCVForUnity.Structured_lightModule.SinusoidalPattern.computePhaseMap | ( | List< Mat > | patternImages, |
| Mat | wrappedPhaseMap | ||
| ) |
Compute a wrapped phase map from sinusoidal patterns.
- Parameters
-
patternImages Input data to compute the wrapped phase map. wrappedPhaseMap Wrapped phase map obtained through one of the three methods. shadowMask Mask used to discard shadow regions. fundamental Fundamental matrix used to compute epipolar lines and ease the matching step.
◆ create() [1/2]
|
static |
Constructor.
- Parameters
-
parameters SinusoidalPattern parameters SinusoidalPattern::Params: width, height of the projector and patterns parameters.
◆ create() [2/2]
|
static |
Constructor.
- Parameters
-
parameters SinusoidalPattern parameters SinusoidalPattern::Params: width, height of the projector and patterns parameters.
◆ Dispose()
|
protectedvirtual |
Reimplemented from OpenCVForUnity.CoreModule.Algorithm.
◆ findProCamMatches()
| void OpenCVForUnity.Structured_lightModule.SinusoidalPattern.findProCamMatches | ( | Mat | projUnwrappedPhaseMap, |
| Mat | camUnwrappedPhaseMap, | ||
| List< Mat > | matches | ||
| ) |
Find correspondences between the two devices thanks to unwrapped phase maps.
- Parameters
-
projUnwrappedPhaseMap Projector's unwrapped phase map. camUnwrappedPhaseMap Camera's unwrapped phase map. matches Images used to display correspondences map.
◆ unwrapPhaseMap() [1/2]
| void OpenCVForUnity.Structured_lightModule.SinusoidalPattern.unwrapPhaseMap | ( | Mat | wrappedPhaseMap, |
| Mat | unwrappedPhaseMap, | ||
| Size | camSize, | ||
| Mat | shadowMask | ||
| ) |
Unwrap the wrapped phase map to remove phase ambiguities.
- Parameters
-
wrappedPhaseMap The wrapped phase map computed from the pattern. unwrappedPhaseMap The unwrapped phase map used to find correspondences between the two devices. camSize Resolution of the camera. shadowMask Mask used to discard shadow regions.
◆ unwrapPhaseMap() [2/2]
| void OpenCVForUnity.Structured_lightModule.SinusoidalPattern.unwrapPhaseMap | ( | Mat | wrappedPhaseMap, |
| Mat | unwrappedPhaseMap, | ||
| Size | camSize | ||
| ) |
Unwrap the wrapped phase map to remove phase ambiguities.
- Parameters
-
wrappedPhaseMap The wrapped phase map computed from the pattern. unwrappedPhaseMap The unwrapped phase map used to find correspondences between the two devices. camSize Resolution of the camera. shadowMask Mask used to discard shadow regions.
The documentation for this class was generated from the following file:
- OpenCVForUnity/Assets/OpenCVForUnity/org/opencv_contrib/structured_light/SinusoidalPattern.cs
