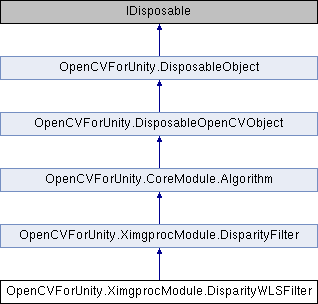
Disparity map filter based on Weighted Least Squares filter (in form of Fast Global Smoother that is a lot faster than traditional Weighted Least Squares filter implementations) and optional use of left-right-consistency-based confidence to refine the results in half-occlusions and uniform areas.
More...
|
| double | getLambda () |
| | Lambda is a parameter defining the amount of regularization during filtering. Larger values force filtered disparity map edges to adhere more to source image edges. Typical value is 8000. More...
|
| |
| void | setLambda (double _lambda) |
| |
| double | getSigmaColor () |
| | SigmaColor is a parameter defining how sensitive the filtering process is to source image edges. Large values can lead to disparity leakage through low-contrast edges. Small values can make the filter too sensitive to noise and textures in the source image. Typical values range from 0.8 to 2.0. More...
|
| |
| void | setSigmaColor (double _sigma_color) |
| |
| int | getLRCthresh () |
| | LRCthresh is a threshold of disparity difference used in left-right-consistency check during confidence map computation. The default value of 24 (1.5 pixels) is virtually always good enough. More...
|
| |
| void | setLRCthresh (int _LRC_thresh) |
| |
| int | getDepthDiscontinuityRadius () |
| | DepthDiscontinuityRadius is a parameter used in confidence computation. It defines the size of low-confidence regions around depth discontinuities. More...
|
| |
| void | setDepthDiscontinuityRadius (int _disc_radius) |
| |
| Mat | getConfidenceMap () |
| | Get the confidence map that was used in the last filter call. It is a CV_32F one-channel image with values ranging from 0.0 (totally untrusted regions of the raw disparity map) to 255.0 (regions containing correct disparity values with a high degree of confidence). More...
|
| |
| Rect | getROI () |
| | Get the ROI used in the last filter call. More...
|
| |
| void | filter (Mat disparity_map_left, Mat left_view, Mat filtered_disparity_map, Mat disparity_map_right, Rect ROI, Mat right_view) |
| | Apply filtering to the disparity map. More...
|
| |
| void | filter (Mat disparity_map_left, Mat left_view, Mat filtered_disparity_map, Mat disparity_map_right, Rect ROI) |
| | Apply filtering to the disparity map. More...
|
| |
| void | filter (Mat disparity_map_left, Mat left_view, Mat filtered_disparity_map, Mat disparity_map_right) |
| | Apply filtering to the disparity map. More...
|
| |
| void | filter (Mat disparity_map_left, Mat left_view, Mat filtered_disparity_map) |
| | Apply filtering to the disparity map. More...
|
| |
| IntPtr | getNativeObjAddr () |
| |
| virtual void | clear () |
| | Clears the algorithm state. More...
|
| |
| virtual bool | empty () |
| | Returns true if the Algorithm is empty (e.g. in the very beginning or after unsuccessful read. More...
|
| |
| void | save (string filename) |
| |
| virtual string | getDefaultName () |
| |
| void | Dispose () |
| |
| void | ThrowIfDisposed () |
| |
Disparity map filter based on Weighted Least Squares filter (in form of Fast Global Smoother that is a lot faster than traditional Weighted Least Squares filter implementations) and optional use of left-right-consistency-based confidence to refine the results in half-occlusions and uniform areas.
◆ __fromPtr__()
| static new DisparityWLSFilter OpenCVForUnity.XimgprocModule.DisparityWLSFilter.__fromPtr__ |
( |
IntPtr |
addr | ) |
|
|
static |
◆ Dispose()
| override void OpenCVForUnity.XimgprocModule.DisparityWLSFilter.Dispose |
( |
bool |
disposing | ) |
|
|
protectedvirtual |
◆ getConfidenceMap()
| Mat OpenCVForUnity.XimgprocModule.DisparityWLSFilter.getConfidenceMap |
( |
| ) |
|
Get the confidence map that was used in the last filter call. It is a CV_32F one-channel image with values ranging from 0.0 (totally untrusted regions of the raw disparity map) to 255.0 (regions containing correct disparity values with a high degree of confidence).
◆ getDepthDiscontinuityRadius()
| int OpenCVForUnity.XimgprocModule.DisparityWLSFilter.getDepthDiscontinuityRadius |
( |
| ) |
|
DepthDiscontinuityRadius is a parameter used in confidence computation. It defines the size of low-confidence regions around depth discontinuities.
◆ getLambda()
| double OpenCVForUnity.XimgprocModule.DisparityWLSFilter.getLambda |
( |
| ) |
|
Lambda is a parameter defining the amount of regularization during filtering. Larger values force filtered disparity map edges to adhere more to source image edges. Typical value is 8000.
◆ getLRCthresh()
| int OpenCVForUnity.XimgprocModule.DisparityWLSFilter.getLRCthresh |
( |
| ) |
|
LRCthresh is a threshold of disparity difference used in left-right-consistency check during confidence map computation. The default value of 24 (1.5 pixels) is virtually always good enough.
◆ getROI()
| Rect OpenCVForUnity.XimgprocModule.DisparityWLSFilter.getROI |
( |
| ) |
|
Get the ROI used in the last filter call.
◆ getSigmaColor()
| double OpenCVForUnity.XimgprocModule.DisparityWLSFilter.getSigmaColor |
( |
| ) |
|
SigmaColor is a parameter defining how sensitive the filtering process is to source image edges. Large values can lead to disparity leakage through low-contrast edges. Small values can make the filter too sensitive to noise and textures in the source image. Typical values range from 0.8 to 2.0.
◆ setDepthDiscontinuityRadius()
| void OpenCVForUnity.XimgprocModule.DisparityWLSFilter.setDepthDiscontinuityRadius |
( |
int |
_disc_radius | ) |
|
◆ setLambda()
| void OpenCVForUnity.XimgprocModule.DisparityWLSFilter.setLambda |
( |
double |
_lambda | ) |
|
◆ setLRCthresh()
| void OpenCVForUnity.XimgprocModule.DisparityWLSFilter.setLRCthresh |
( |
int |
_LRC_thresh | ) |
|
◆ setSigmaColor()
| void OpenCVForUnity.XimgprocModule.DisparityWLSFilter.setSigmaColor |
( |
double |
_sigma_color | ) |
|
The documentation for this class was generated from the following file:
 Public Member Functions inherited from OpenCVForUnity.XimgprocModule.DisparityFilter
Public Member Functions inherited from OpenCVForUnity.XimgprocModule.DisparityFilter