The base class for stereo correspondence algorithms. More...
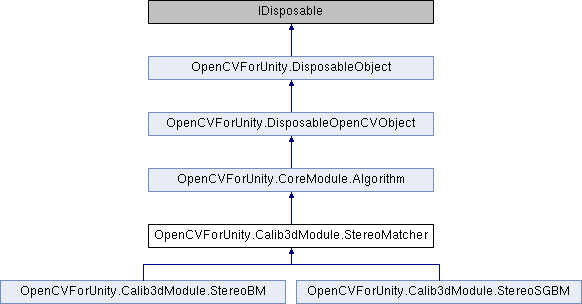
Inheritance diagram for OpenCVForUnity.Calib3dModule.StereoMatcher:
Public Member Functions | |
| void | compute (Mat left, Mat right, Mat disparity) |
| Computes disparity map for the specified stereo pair. More... | |
| int | getMinDisparity () |
| void | setMinDisparity (int minDisparity) |
| int | getNumDisparities () |
| void | setNumDisparities (int numDisparities) |
| int | getBlockSize () |
| void | setBlockSize (int blockSize) |
| int | getSpeckleWindowSize () |
| void | setSpeckleWindowSize (int speckleWindowSize) |
| int | getSpeckleRange () |
| void | setSpeckleRange (int speckleRange) |
| int | getDisp12MaxDiff () |
| void | setDisp12MaxDiff (int disp12MaxDiff) |
 Public Member Functions inherited from OpenCVForUnity.CoreModule.Algorithm Public Member Functions inherited from OpenCVForUnity.CoreModule.Algorithm | |
| IntPtr | getNativeObjAddr () |
| virtual void | clear () |
| Clears the algorithm state. More... | |
| virtual bool | empty () |
| Returns true if the Algorithm is empty (e.g. in the very beginning or after unsuccessful read. More... | |
| void | save (string filename) |
| virtual string | getDefaultName () |
| Public Member Functions inherited from OpenCVForUnity.DisposableObject | |
| void | Dispose () |
| void | ThrowIfDisposed () |
Static Public Member Functions | |
| static new StereoMatcher | __fromPtr__ (IntPtr addr) |
| Static Public Member Functions inherited from OpenCVForUnity.CoreModule.Algorithm | |
| static Algorithm | __fromPtr__ (IntPtr addr) |
| Static Public Member Functions inherited from OpenCVForUnity.DisposableObject | |
| static IntPtr | ThrowIfNullIntPtr (IntPtr ptr) |
Public Attributes | |
| const int | DISP_SHIFT = 4 |
| const int | DISP_SCALE = (1 << DISP_SHIFT) |
Protected Member Functions | |
| override void | Dispose (bool disposing) |
| Protected Member Functions inherited from OpenCVForUnity.CoreModule.Algorithm | |
| override void | Dispose (bool disposing) |
| Protected Member Functions inherited from OpenCVForUnity.DisposableOpenCVObject | |
| DisposableOpenCVObject () | |
| DisposableOpenCVObject (IntPtr ptr) | |
| DisposableOpenCVObject (bool isEnabledDispose) | |
| DisposableOpenCVObject (IntPtr ptr, bool isEnabledDispose) | |
| override void | Dispose (bool disposing) |
| Protected Member Functions inherited from OpenCVForUnity.DisposableObject | |
| DisposableObject () | |
| DisposableObject (bool isEnabledDispose) | |
Additional Inherited Members | |
| Properties inherited from OpenCVForUnity.DisposableObject | |
| bool | IsDisposed [get, protected set] |
| bool | IsEnabledDispose [get, set] |
Detailed Description
The base class for stereo correspondence algorithms.
Member Function Documentation
◆ __fromPtr__()
|
static |
◆ compute()
Computes disparity map for the specified stereo pair.
- Parameters
-
left Left 8-bit single-channel image. right Right image of the same size and the same type as the left one. disparity Output disparity map. It has the same size as the input images. Some algorithms, like StereoBM or StereoSGBM compute 16-bit fixed-point disparity map (where each disparity value has 4 fractional bits), whereas other algorithms output 32-bit floating-point disparity map.
◆ Dispose()
|
protectedvirtual |
Reimplemented from OpenCVForUnity.DisposableObject.
Reimplemented in OpenCVForUnity.Calib3dModule.StereoSGBM.
◆ getBlockSize()
| int OpenCVForUnity.Calib3dModule.StereoMatcher.getBlockSize | ( | ) |
◆ getDisp12MaxDiff()
| int OpenCVForUnity.Calib3dModule.StereoMatcher.getDisp12MaxDiff | ( | ) |
◆ getMinDisparity()
| int OpenCVForUnity.Calib3dModule.StereoMatcher.getMinDisparity | ( | ) |
◆ getNumDisparities()
| int OpenCVForUnity.Calib3dModule.StereoMatcher.getNumDisparities | ( | ) |
◆ getSpeckleRange()
| int OpenCVForUnity.Calib3dModule.StereoMatcher.getSpeckleRange | ( | ) |
◆ getSpeckleWindowSize()
| int OpenCVForUnity.Calib3dModule.StereoMatcher.getSpeckleWindowSize | ( | ) |
◆ setBlockSize()
| void OpenCVForUnity.Calib3dModule.StereoMatcher.setBlockSize | ( | int | blockSize | ) |
◆ setDisp12MaxDiff()
| void OpenCVForUnity.Calib3dModule.StereoMatcher.setDisp12MaxDiff | ( | int | disp12MaxDiff | ) |
◆ setMinDisparity()
| void OpenCVForUnity.Calib3dModule.StereoMatcher.setMinDisparity | ( | int | minDisparity | ) |
◆ setNumDisparities()
| void OpenCVForUnity.Calib3dModule.StereoMatcher.setNumDisparities | ( | int | numDisparities | ) |
◆ setSpeckleRange()
| void OpenCVForUnity.Calib3dModule.StereoMatcher.setSpeckleRange | ( | int | speckleRange | ) |
◆ setSpeckleWindowSize()
| void OpenCVForUnity.Calib3dModule.StereoMatcher.setSpeckleWindowSize | ( | int | speckleWindowSize | ) |
Member Data Documentation
◆ DISP_SCALE
| const int OpenCVForUnity.Calib3dModule.StereoMatcher.DISP_SCALE = (1 << DISP_SHIFT) |
◆ DISP_SHIFT
| const int OpenCVForUnity.Calib3dModule.StereoMatcher.DISP_SHIFT = 4 |
The documentation for this class was generated from the following file:
- OpenCVForUnity/Assets/OpenCVForUnity/org/opencv/calib3d/StereoMatcher.cs
