Inverse camera response function is extracted for each brightness value by minimizing an objective function as linear system. This algorithm uses all image pixels. More...
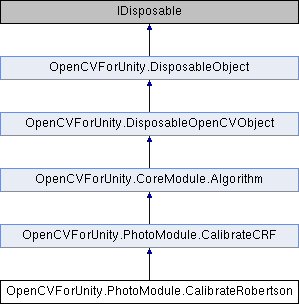
Inheritance diagram for OpenCVForUnity.PhotoModule.CalibrateRobertson:
Public Member Functions | |
| int | getMaxIter () |
| void | setMaxIter (int max_iter) |
| float | getThreshold () |
| void | setThreshold (float threshold) |
| Mat | getRadiance () |
 Public Member Functions inherited from OpenCVForUnity.PhotoModule.CalibrateCRF Public Member Functions inherited from OpenCVForUnity.PhotoModule.CalibrateCRF | |
| void | process (List< Mat > src, Mat dst, Mat times) |
| Recovers inverse camera response. More... | |
| Public Member Functions inherited from OpenCVForUnity.CoreModule.Algorithm | |
| IntPtr | getNativeObjAddr () |
| virtual void | clear () |
| Clears the algorithm state. More... | |
| virtual bool | empty () |
| Returns true if the Algorithm is empty (e.g. in the very beginning or after unsuccessful read. More... | |
| void | save (string filename) |
| virtual string | getDefaultName () |
| Public Member Functions inherited from OpenCVForUnity.DisposableObject | |
| void | Dispose () |
| void | ThrowIfDisposed () |
Static Public Member Functions | |
| static new CalibrateRobertson | __fromPtr__ (IntPtr addr) |
| Static Public Member Functions inherited from OpenCVForUnity.PhotoModule.CalibrateCRF | |
| static new CalibrateCRF | __fromPtr__ (IntPtr addr) |
| Static Public Member Functions inherited from OpenCVForUnity.CoreModule.Algorithm | |
| static Algorithm | __fromPtr__ (IntPtr addr) |
| Static Public Member Functions inherited from OpenCVForUnity.DisposableObject | |
| static IntPtr | ThrowIfNullIntPtr (IntPtr ptr) |
Protected Member Functions | |
| override void | Dispose (bool disposing) |
| Protected Member Functions inherited from OpenCVForUnity.DisposableOpenCVObject | |
| DisposableOpenCVObject () | |
| DisposableOpenCVObject (IntPtr ptr) | |
| DisposableOpenCVObject (bool isEnabledDispose) | |
| DisposableOpenCVObject (IntPtr ptr, bool isEnabledDispose) | |
| Protected Member Functions inherited from OpenCVForUnity.DisposableObject | |
| DisposableObject () | |
| DisposableObject (bool isEnabledDispose) | |
Additional Inherited Members | |
| Properties inherited from OpenCVForUnity.DisposableObject | |
| bool | IsDisposed [get, protected set] |
| bool | IsEnabledDispose [get, set] |
Detailed Description
Inverse camera response function is extracted for each brightness value by minimizing an objective function as linear system. This algorithm uses all image pixels.
For more information see [RB99] .
Member Function Documentation
◆ __fromPtr__()
|
static |
◆ Dispose()
|
protectedvirtual |
Reimplemented from OpenCVForUnity.PhotoModule.CalibrateCRF.
◆ getMaxIter()
| int OpenCVForUnity.PhotoModule.CalibrateRobertson.getMaxIter | ( | ) |
◆ getRadiance()
| Mat OpenCVForUnity.PhotoModule.CalibrateRobertson.getRadiance | ( | ) |
◆ getThreshold()
| float OpenCVForUnity.PhotoModule.CalibrateRobertson.getThreshold | ( | ) |
◆ setMaxIter()
| void OpenCVForUnity.PhotoModule.CalibrateRobertson.setMaxIter | ( | int | max_iter | ) |
◆ setThreshold()
| void OpenCVForUnity.PhotoModule.CalibrateRobertson.setThreshold | ( | float | threshold | ) |
The documentation for this class was generated from the following file:
- OpenCVForUnity/Assets/OpenCVForUnity/org/opencv/photo/CalibrateRobertson.cs
